Supplemental Material
This chapter provides three parts supplemental materials of our paper:
(1). Comparison with paper BehaVerify: Verifying Temporal Logic Specifications for Behavior Trees
(2). Semantics validation of our language.
(3). The BTs of Computational Complexity Analysis and Scalability Study.
Comparison With BehaVerify
BehaVerify converts BTs to SMV models and performs model checking-based verification. It has two types of encoding, one is Leaf and one is Total. The state of the whole tree in the Total encoding method is computed in one tick. As a result, the temporal relationship between BT actions disappears. So, we choose Leaf coding for comparison.
We compare both modeling and verification.
Modeling
| BehaVerify | MoVe4BT | |
|---|---|---|
| Node Type | Execution,Control,Decorator | Execution,Control |
| Concurrency | No | Yes |
Compared to BehaVerify, we do not support modeling Decorator nodes. Although we all support modeling control nodes such as Sequence nodes, Fallback nodes, and Parallel nodes. However, BehaVerify encodes parallel nodes as sequential nodes, the child nodes of the Parallel nodes of BehaVerify are still executed in the order from left to right, limiting the ability to verify the BTs with parallel nodes. While the child nodes of our parallel node truly achieve concurrency.
Verification
| BehaVerify | MoVe4BT | |
|---|---|---|
| Specifications | LTL, CTL, Invariant | LTL, Reachability, Timed Specifications |
Compared to BehaVerify, we do not support CTL and Invariant property verification, but we do support property verification for Reachability and Timed behavior specifications.
Evaluation
We use the Checklist benchmark of BehaVerify for evaluation. The reason for not choosing the BlueROV benchmark is that it contains parallel nodes. Checklist is a series of examples, consisting of many fallback nodes connected by sequence nodes, and each rollback node is composed of a condition node and an action node. The BTs corresponding to Checklist5 and Checklsit10 is shown in the figure below(the image is from the website of BehaVerify):
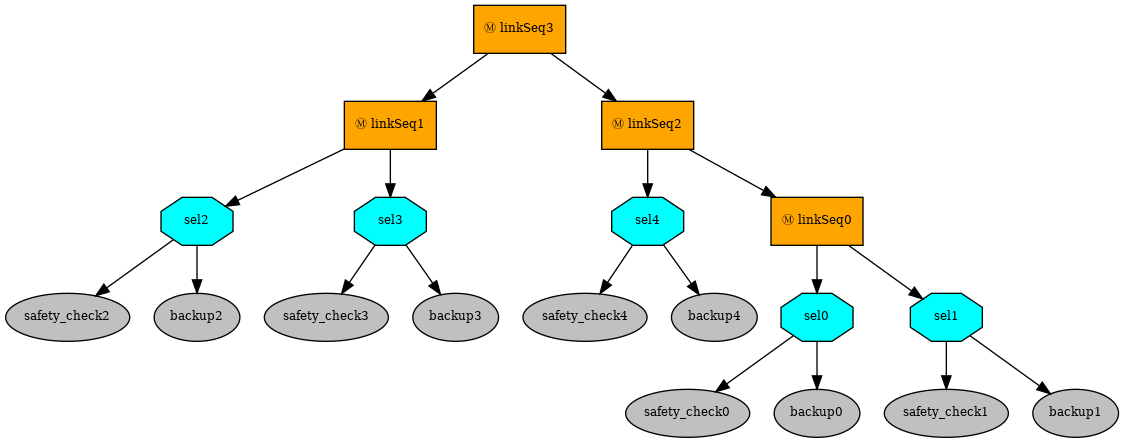
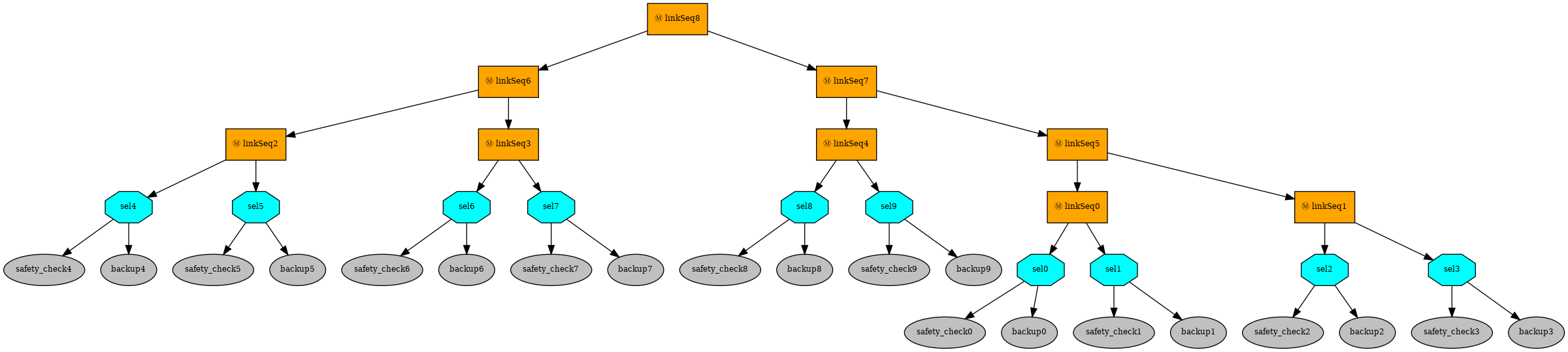
Each fallback node is designed with two LTL properties for verification, checklisti contains i fallback nodes, 2i LTL properties.
G(safetychecki_f-> X(backupi_r || backupi_f || backupi_s));
G(safetychecki_f-> !X(backupi_r || backupi_f || backupi_s));
We selected 11 BTs from the Checklist benchmark, namely checklist1, checklist5, …, checklist50, for our evaluation. These BTs progressively increase in scales and properties. We carried out 552 verification tasks (i.e., each task contains a BT and an LTL) using both approaches. The evaluation results are shown in the figure below:
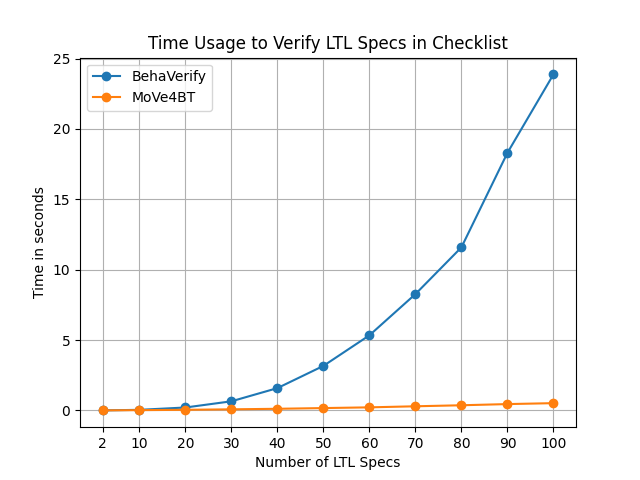
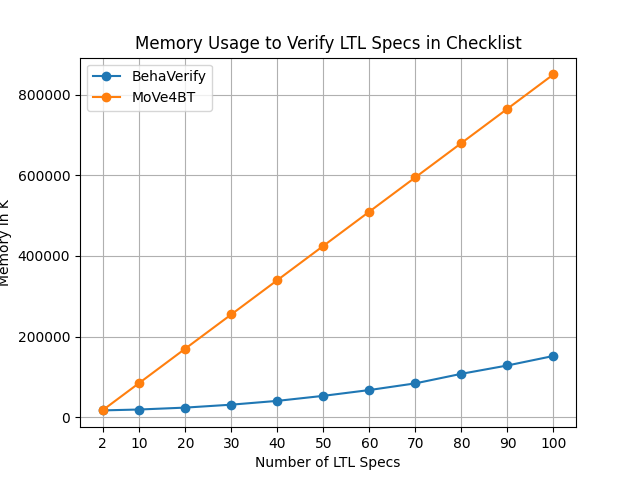
In total, our tool and BehaVerify need 2.32s and 73.07s to finish all the verification tasks, respectively, indicating our tool’s efficiecy. Besides, our tool needs more memory than BehaVerify. All the raw data is stored under the github repository that we created.
Semantics Validation
We validate the correctness of our semantics by comparing it with existing BT simulators BehaviorTreeCPP. We used it to execute representative BTs multiple times to generate behavior sequences. Then, we use our semantics to obtain the behavior sequences of the same BTs.
We validate that the behavioral sequences generated by the simulator are contained in the sequences generated by our semantics, indicating the correctness of our semantics for verification. However, the Parallel nodes of BehaviorTreeCPP do not really achieve concurrency, and the children of its Parallel nodes are still executed sequentially. So the BTs we designed for semantics validation does not include parallel nodes.
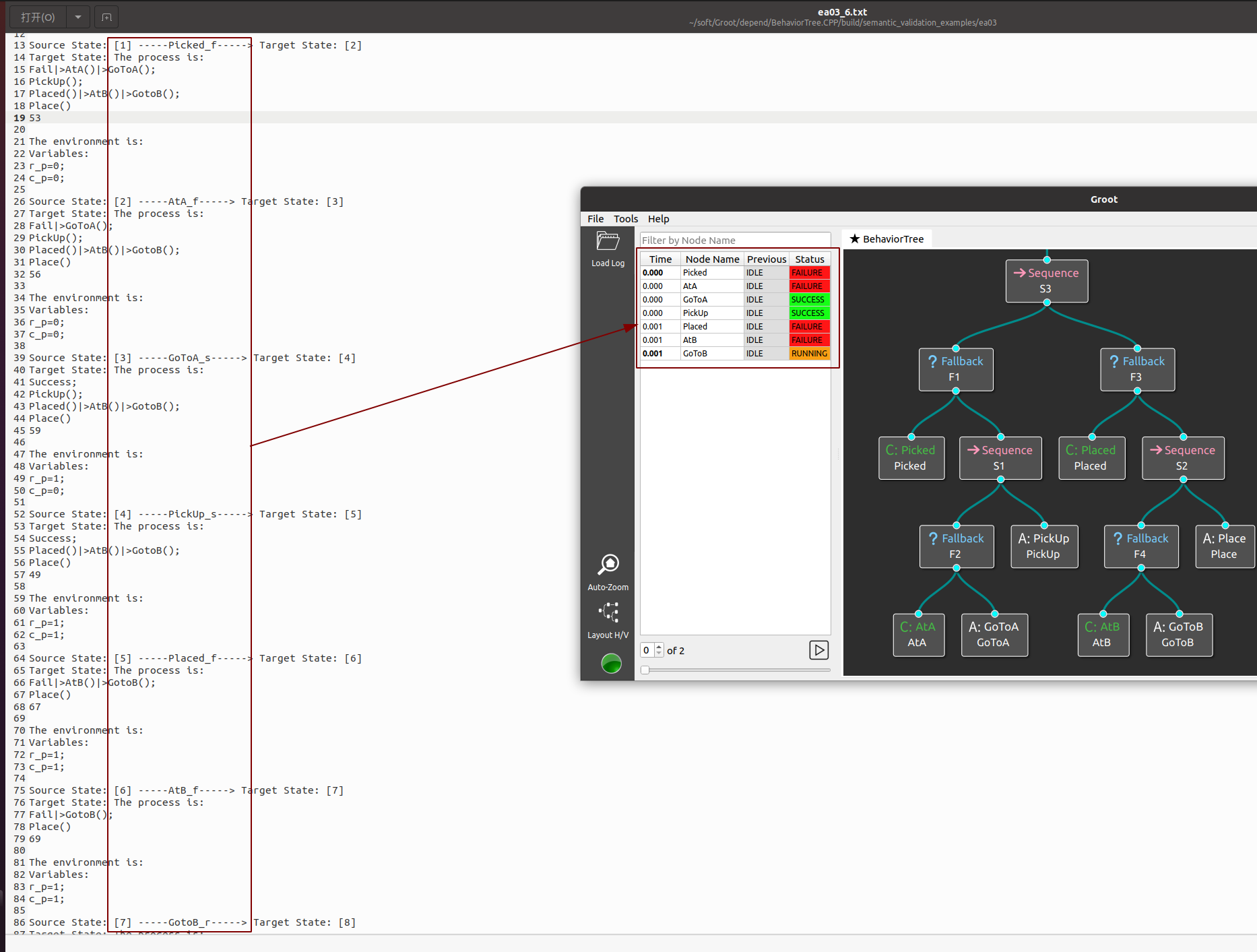
We made four examples to validate our semantics, two basic: Sequence and Fallback, and two complete examples: Pick_Place and Patrol. The .fbl file is the behavior sequence obtained by BehaviorTreeCPP, which can only be visualized using the Groot that comes with BehaviorTreeCPP. The .txt file is the same behavior sequence obtain by MoVe4BT.
For example, The red box on the left side of the following figure shows the sequence of behaviors executed using MoVe4BT, while the right side of the figure shows the sequence of behaviors executed using BehaviorTreeCPP. The left side is opened with a text editor, and the right side is opened with Groot’s Log-Replay that comes with BehaviorTreeCPP.
All the raw data is stored under the github repository that we created.
The BTs of Computational Complexity Analysis and Scalability Study
This section provides detailed introduction of experimental BTs in our paper.
The BT with 3 patrol locations is shown in the following figure. x==-1 is always false. By ensuring this, we can guarantee the successful execution of the Goto action. The variable rp represents the position of the robot. The successful execution of the GoTo action leads to a change in the robot’s location. When GoToA succeeds, rp is set to 1, indicating that the robot is at location A. Similarly, when GoToB succeeds, rp is set to 2, representing the robot is at location B.
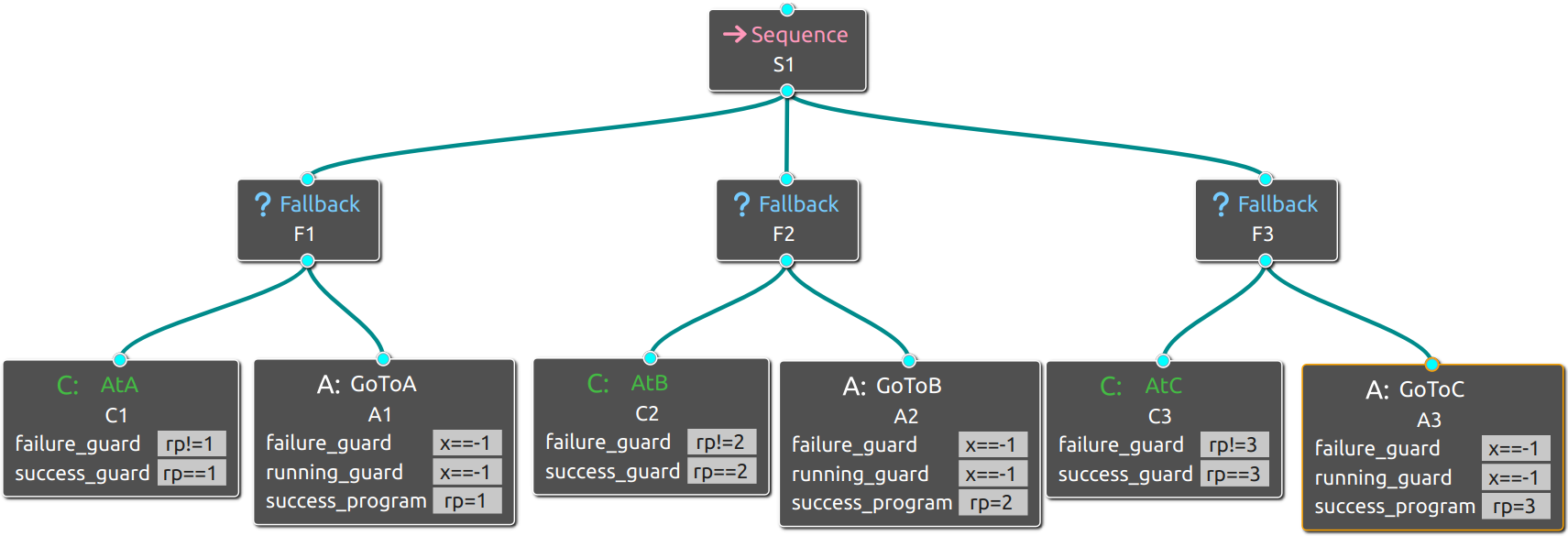
We aim for this BT to ensure that the robot will visit the locations A, B, and C in strict order. We can ensure this by checking whether the following LTL formula φ3 is satisfied or violated.
F (A1_s && A2_s && A3_s ) && (!A2_s U A1_s) && (!A3_s U A2_s)
Therefore, as we increase the number of locations, the LTL formula will become longer, and the size of the BT will also grow. Let the number of locations be denoted as n, the number of nodes in the BT would be 3n + 1 and the LTL formula φn would be:
F (A1_s && A2_s && ... && An_s ) && (!A2_s U A1_s) && (!A3_s U A2_s) && ... && (!An_s U An-1_s)
Contacts
Please feel free to contact us if you have any questions about MoVe4BT.
- Peishan Huang (huang_ps@nudt.edu.cn)
- Weijiang Hong (hongweijiang17@nudt.edu.cn)
- Zhenbang Chen (zbchen@nudt.edu.cn)
- Ji Wang (wj@nudt.edu.cn)